题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
控制系统A如图9-3(a)所示,控制系统B如.图9-3(b)所示。 (1)分别求系统A、系统B的u到y的传递
控制系统A如图9-3(a)所示,控制系统B如.图9-3(b)所示。
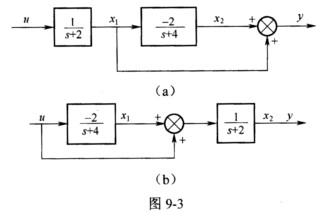 (1)分别求系统A、系统B的u到y的传递函数。 (2)判断系统A和系统B的可控性和可观测性(列出判断过程),并对判断结果进行比较和解释。
(1)分别求系统A、系统B的u到y的传递函数。 (2)判断系统A和系统B的可控性和可观测性(列出判断过程),并对判断结果进行比较和解释。
 如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
控制系统A如图9-3(a)所示,控制系统B如.图9-3(b)所示。
(1)分别求系统A、系统B的u到y的传递函数。 (2)判断系统A和系统B的可控性和可观测性(列出判断过程),并对判断结果进行比较和解释。
如搜索结果不匹配,请 联系老师 获取答案
 更多“控制系统A如图9-3(a)所示,控制系统B如.图9-3(b)…”相关的问题
更多“控制系统A如图9-3(a)所示,控制系统B如.图9-3(b)…”相关的问题
第1题
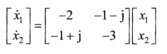
已知系统的动态方程为:
 求初态为x1(0)=2,x2(0)=3时,系统在单位阶跃输入作用下: (1)系统的状态响应表达式。 (2)求系统输出范数最小的时刻t。 (3)写出系统的传递函数。
求初态为x1(0)=2,x2(0)=3时,系统在单位阶跃输入作用下: (1)系统的状态响应表达式。 (2)求系统输出范数最小的时刻t。 (3)写出系统的传递函数。
请帮忙给出正确答案和分析,谢谢!
第2题
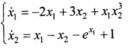
试求: (1)取Q=6I2通过求解Lyapunov方程判断线性系统稳定性。
 (2)应用Lyapunov第一方法分析非线性系统在平衡点x1=x2=0稳定性。
(2)应用Lyapunov第一方法分析非线性系统在平衡点x1=x2=0稳定性。
请帮忙给出正确答案和分析,谢谢!
第4题
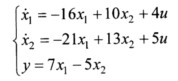
已知某单位负反馈系统的状态空间描述为:
 (1)求该系统的传递函数G(s)。 (2)试分析该闭环系统的可控性、可观测性。 (3)试求该闭环系统的可控标准型。
(1)求该系统的传递函数G(s)。 (2)试分析该闭环系统的可控性、可观测性。 (3)试求该闭环系统的可控标准型。
请帮忙给出正确答案和分析,谢谢!




为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 上学吧
微信搜一搜
上学吧
上学吧
微信搜一搜
上学吧