 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
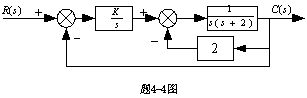
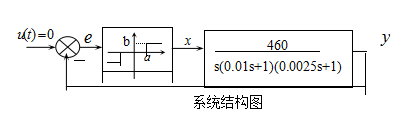
已知控制系统结构图如图所示。 (1)当不存在速度反馈(b=0)时,试确定单位阶跃输入时系统的阻尼系数、自然频率、最大超调量以及由单位斜坡输入所引起的稳态误差。 (2)确定系统阻尼比等于0.8时的速度反馈常数b的值,并确定在单位阶跃输入时系统的最大超调量和单位斜坡输入所引起的稳态误差。
已知控制系统结构图如图所示。 (1)当不存在速度反馈(b=0)时,试确定单位阶跃输入时系统的阻尼系数、自然频率、最大超调量以及由单位斜坡输入所引起的稳态误差。 (2)确定系统阻尼比等于0.8时的速度反馈常数b的值,并确定在单位阶跃输入时系统的最大超调量和单位斜坡输入所引起的稳态误差。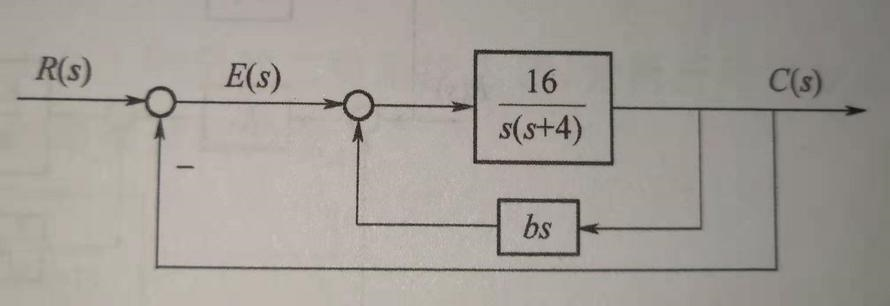
 如搜索结果不匹配,请 联系老师 获取答案
如搜索结果不匹配,请 联系老师 获取答案


 为大于0的已知参数,且
为大于0的已知参数,且 。 问使系统具有最大相角裕度的
。 问使系统具有最大相角裕度的 值为( )。
值为( )。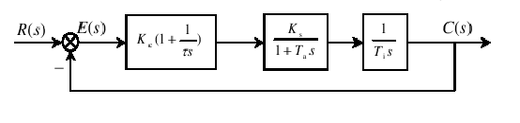




 试选择a,b值,使系统等效开环传递函数由1型提高为3型。( )
试选择a,b值,使系统等效开环传递函数由1型提高为3型。( )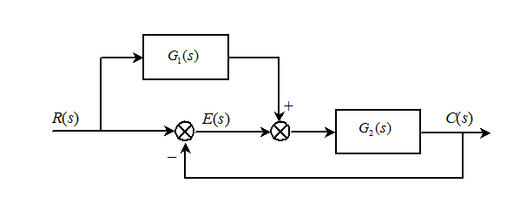





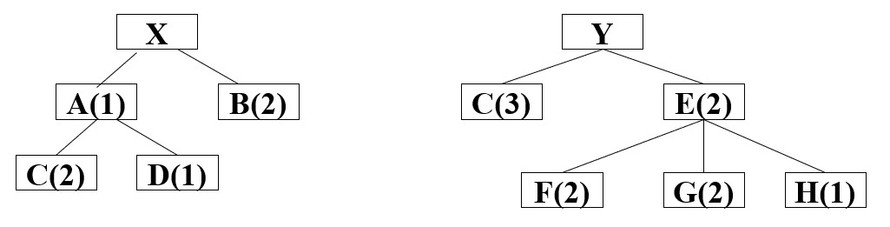
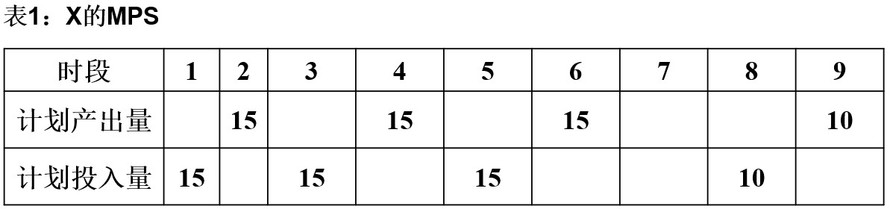
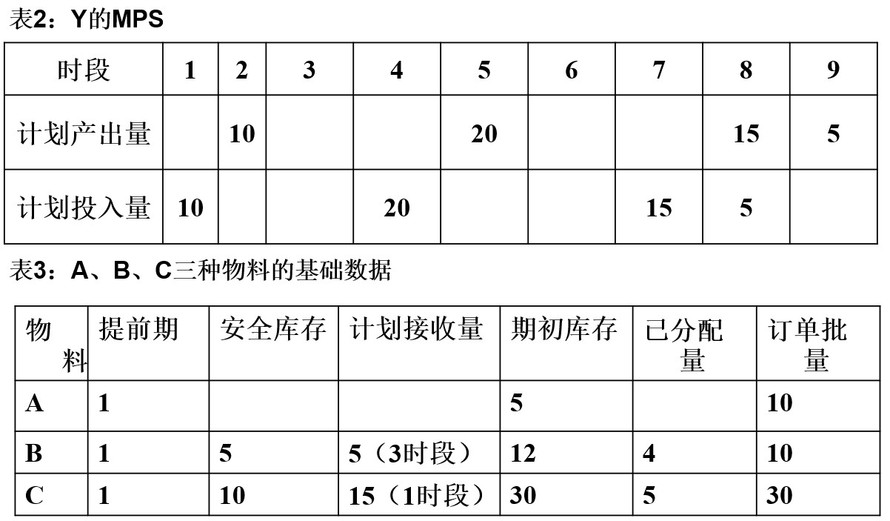
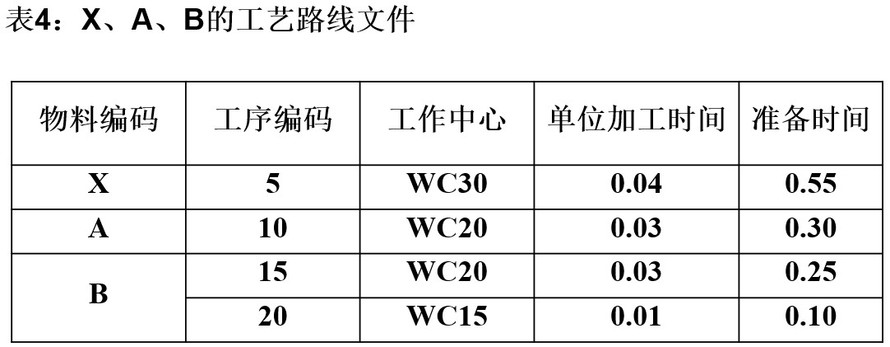 1、编制物料A、B和C的MRP。 2、编制X、A、B三种物料的CRP。(计算三种物料各工作 中心的工序负荷,再编制各工作中心的能力需求计划。)
1、编制物料A、B和C的MRP。 2、编制X、A、B三种物料的CRP。(计算三种物料各工作 中心的工序负荷,再编制各工作中心的能力需求计划。) ,
, ,
, 则下列说法正确的是()
则下列说法正确的是()
 ,
, ,
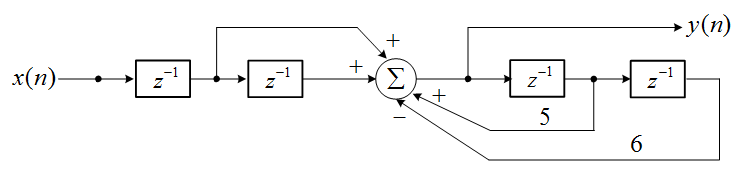
, ,则系统的单位冲激响应为
,则系统的单位冲激响应为
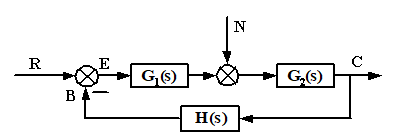
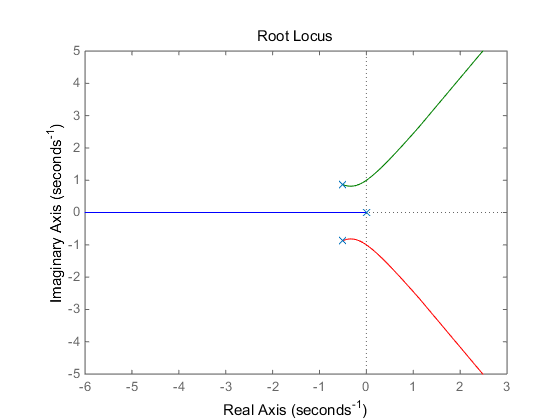
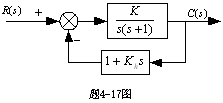 当Kh=0.5,K=10时系统的闭环极点与对应的x值为
当Kh=0.5,K=10时系统的闭环极点与对应的x值为




 。
。
 ,
,
 ,
,
 ,
,





















