 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
已知系统的闭环传递函数为
已知系统的闭环传递函数为  ,当输入
,当输入  时,测得输出
时,测得输出  ,则系统的
,则系统的  为()。
为()。
A.
B. 
C. 
D. 
 如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
,当输入 时,测得输出 ,则系统的 为()。
如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
,当输入 时,测得输出 ,则系统的 为()。
A.
B.
C.
D.
如搜索结果不匹配,请 联系老师 获取答案
 更多“已知系统的闭环传递函数为 ,当输入 时,测得输出 ,则系统的…”相关的问题
更多“已知系统的闭环传递函数为 ,当输入 时,测得输出 ,则系统的…”相关的问题
第2题
1、已知系统的开环传递函数为,则该系统的开环增益为 ( )。
A、 50 B、25 C、10 D、5
2、下列传递函数中,为惯性环节的是( )
A、 G(s)=k/s2+s+k B 、G(s)=k
C 、 G(s)=1/s+k D、G(s)=k/s
3、系统在r(t)=t2作用下的稳态误差ess=∞,说明 ( )
A、 型别v<2; B、系统不稳定;
C、 输入幅值过大; D、闭环传递函数中有一个积分环节。
4、单位反馈系统的开环传递函数G(s)=k/s(s+1),则下列说法错误的是 ( )。
A、系统为Ⅱ型系统;
B、其闭环传递函数为G(s)=k/s2+s+k;
C、其对数幅频图的起始段斜率为[-20];
D、系统传递函数为振荡环节。
5、系统的传递函数为G(s)=5/s2+3s+2,其为__系统,系统的零点是 ___ ,极点是 ____ ,特征方程是 ____ 。
6、传递函数是指在零初始条件下、线性定常控制系统的 __与
____ 之比。
7、若系统的开环传递函数为10/s+2,其频率特性为 ———— ,其A(0) =____ , φ(0)=______ 。
二、1. 画出二阶欠阻尼系统单位阶跃响应曲线。
三、计算题
1、系统传递函数G(s)=10/(5s+1),输入r(t)=1,求其输出y(t)。
2、系统传递函数为G(s)=3s^3+12s^2+17s+20/s^5+2s^4+14s^3+88s^2+200s+800,用劳斯判据判定其稳定性
四、综合
已知反馈系统的开环传递函数为G(s)H(s)=K/s(s+1) ,
1、若给定输入r(t) = t时,要求系统的稳态误差为0.25,问开环增益K应取何值。
2、确定系统的阻尼比ζ 和固有频率ωn
3、求系统最大百分比超调量δp%,调整时间ts(误差允许5%)
第4题
 试求: (1)系统的开环传递函数。 (2)绘制系统开环对数幅频特性渐近线。 (3)幅频特性向右平移,分析系统性能有何变化。
试求: (1)系统的开环传递函数。 (2)绘制系统开环对数幅频特性渐近线。 (3)幅频特性向右平移,分析系统性能有何变化。
第5题
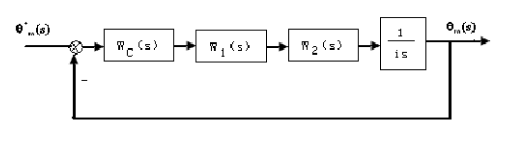
某小功率随动系统,采用位置、转速和电流环多环结构,其结构图如图所示。图中,相敏整流和滤波环节传递函数为 ,转速环的等效闭环传递函数为
,转速环的等效闭环传递函数为 ,i为减速比。已知:Kbs=0.007V/(°),Tph=0.002s,T∑n=0.01s,K2=0.00025V·s/(°),i=4A,要求设计一个位置调节器,使系统满足下述性能指标:
,i为减速比。已知:Kbs=0.007V/(°),Tph=0.002s,T∑n=0.01s,K2=0.00025V·s/(°),i=4A,要求设计一个位置调节器,使系统满足下述性能指标:
①单位加速度输入时,系统原理误差esa≤0.01°
②阶跃响应动态指标:σ≤30%,ts=0.3s。
第6题
设已知描述某控制系统的运动方程组如下

 式中,r(t)为系统的输入量;n1(t)、n2(t)为系统的扰动量;C(t)为系统的输出量;x1(t)~x5(t)为中间变量;K0、K1、K2为常值增益;T为时间常数。
式中,r(t)为系统的输入量;n1(t)、n2(t)为系统的扰动量;C(t)为系统的输出量;x1(t)~x5(t)为中间变量;K0、K1、K2为常值增益;T为时间常数。
试绘制该控制系统的传递函数方框图,并由此方框图求取闭环传递函数C(s)/R(s)、C(s)/N1(s)及C(s)/N2(s)。
第7题
x1(t)=r(t)-C(t)+n1(t) (1)
x2(t)=K1x1(t) (2)
x3(t)=x2(t)-x5(t) (3)
(4)
x5(t)=x4(t)-K2n2(t) (5)
(6)
式中,r(t)为系统的输入量;n1(t)、n2(t)为系统的扰动量;C(t)为系统的输出量;x1(t)~x5(t)为中间变量;K0、K1、K2为常值增益;T为时间常数。
试绘制该控制系统的传递函数方框图,并由此方框图求取闭环传递函数C(s)/R(s)、C(s)/N1(s)及C(s)/N2(s)。
第8题
设已知描述某控制系统的运动方程组如下
x1(t)=r(t)-C(t)+n1(t) (1)
x2(t)=K1x1(t) (2)
x3(t)=x2(t)-x5(t) (3)
 (4)
(4)
x5(t)=x4(t)-K2n2(t) (5)
 (6)
(6)
式中,r(t)为系统的输入量;n1(t)、n2(t)为系统的扰动量;C(t)为系统的输出量;x1(t)~x5(t)为中间变量;K0、K1、K2为常值增益;T为时间常数。
试绘制该控制系统的传递函数方框图,并由此方框图求取闭环传递函数C(s)/R(s)、C(s)/N1(s)及C(s)/N2(s)。
第9题
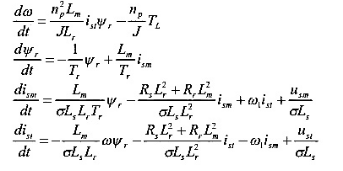
坐标系的旋转角速度为
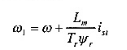
假定电流闭环控制性能足够好,电流闭环控制的等效传递函数为惯性环节
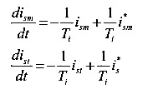
Ti为等效惯性时间常数,画出电流闭环控制后系统的动态结构图,输入为i'sm和i's,输出为 和
和 ,讨论系统的稳定性。
,讨论系统的稳定性。




为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 上学吧
微信搜一搜
上学吧
上学吧
微信搜一搜
上学吧



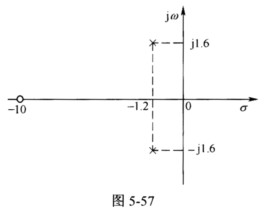
 其主导极点为()
其主导极点为()













