 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
若系统传递函数为G(s)=2/(s+3),则系统在频率ω=1.732rad/s时的相位为()。
A.30°
B.45°
C.-30°
D.-45°
 如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
A.30°
B.45°
C.-30°
D.-45°
如搜索结果不匹配,请 联系老师 获取答案
 更多“若系统传递函数为G(s)=2/(s+3),则系统在频率ω=1…”相关的问题
更多“若系统传递函数为G(s)=2/(s+3),则系统在频率ω=1…”相关的问题
第1题
(1)静态速度误差系数Kv≥100s-1;
(2)开环穿越频率ωc>30rad/s;
(3)相位裕度γ≥35°。
第2题
第3题

要求校正后系统的相位裕度γ(ωc)=40°±2°,增益裕量等于10dB, 穿越频率ωc≥1rad/s,且开环增益保持不变,试确定中联滞后校正装置。
第4题
设单位反馈系统的开环传递函数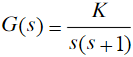 ,试设计一串联超前校正装置,使系统满足如下指标:
,试设计一串联超前校正装置,使系统满足如下指标:
(1)相位裕度γ≥45°;
(2)在单位斜坡输入下的稳态误差![]() ;
;
(3)穿越频率ωc≥7.5rad/s。
第5题
已知单位反馈最小相位系统的开环对数幅频特性L0(ω)和串联校正装置的对数幅频特性Lc(ω)如图6-17所示。原系统的幅值穿越频率为24.3rad/s:
1、 写出原系统的开环传递函数G0(s),并求其相角裕度y0,判断系统的稳定性;
2、 写出校正装置的传递函数G0(s);
3、写出校正后的开环传递函数G0(s)Gc(s),画出校正后系统的开环对数幅频特性LGC(ω),并用劳斯判据判断系统的稳定性。
第6题
(1)稳态速度误差系数Kv≥250;
(2)剪切频率叫ωc≥30rad·s-1;
(3)相位裕量γ(ωc)≥45°。
第7题
 (1)画出G(s)的完整奈氏图,用奈氏稳定判据判断闭环系统的稳定性。 (2)在奈氏图上指出增益交界频率ωm、相位交界频率ωc、相位裕量γ,并给出增益裕量Kg的大小。 (3)为使系统的增益裕量K=∞,试选择一串联控制器K(s)。要求给出K(s)的传递函数和参数取值范围,并简述选取理由。
(1)画出G(s)的完整奈氏图,用奈氏稳定判据判断闭环系统的稳定性。 (2)在奈氏图上指出增益交界频率ωm、相位交界频率ωc、相位裕量γ,并给出增益裕量Kg的大小。 (3)为使系统的增益裕量K=∞,试选择一串联控制器K(s)。要求给出K(s)的传递函数和参数取值范围,并简述选取理由。
第8题
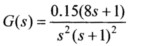
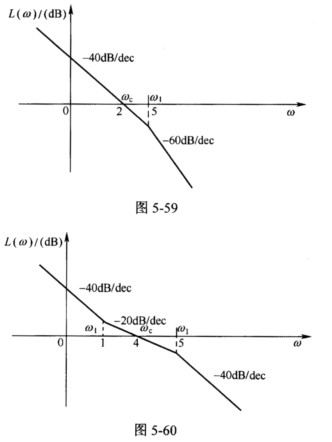 试求: (1)绘制系统的开环幅频渐近特性(需标注各段折线的斜率及转折频率),并求出系统的相位裕量见图5-59和图5-60。
试求: (1)绘制系统的开环幅频渐近特性(需标注各段折线的斜率及转折频率),并求出系统的相位裕量见图5-59和图5-60。
 (2)在系统中串联一个比例一微分环节(s+1),绘制校正后系统的开环幅频渐近特性,并求出校正后系统的开环截止频率和相位裕量。 (3)比较前后的计算结果,说明相对稳定性较好的系统,对数幅频特性在中频段应具有的形状。
(2)在系统中串联一个比例一微分环节(s+1),绘制校正后系统的开环幅频渐近特性,并求出校正后系统的开环截止频率和相位裕量。 (3)比较前后的计算结果,说明相对稳定性较好的系统,对数幅频特性在中频段应具有的形状。




为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 上学吧
微信搜一搜
上学吧
上学吧
微信搜一搜
上学吧















