 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
矩形截面悬臂梁如图所示,在梁上表面相距a=100mm处贴有两电阻应变片,测得AB两点纵向线应变之差εB-εA=150×10-
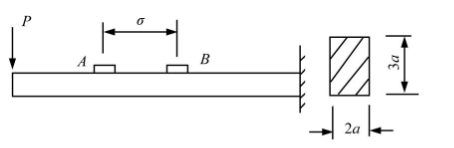
矩形截面悬臂梁如图所示,在梁上表面相距a=100mm处贴有两电阻应变片,测得AB两点纵向线应变之差εB-εA=150×10-6,梁材料的弹性模量E=200GPa,求荷载F的值。
 如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
矩形截面悬臂梁如图所示,在梁上表面相距a=100mm处贴有两电阻应变片,测得AB两点纵向线应变之差εB-εA=150×10-6,梁材料的弹性模量E=200GPa,求荷载F的值。
如搜索结果不匹配,请 联系老师 获取答案
 更多“矩形截面悬臂梁如图所示,在梁上表面相距a=100mm处贴有两…”相关的问题
更多“矩形截面悬臂梁如图所示,在梁上表面相距a=100mm处贴有两…”相关的问题
第1题
A.组合逻辑控制器是由软件实现的,所以比较灵活
B.组合逻辑控制器是由硬件实现的,因此速度很快
C.组合逻辑控制器是由软件实现的,所以容易修改
D.组合逻辑控制器是一系列微指令实现的,因此体积很小
第2题
A.组合逻辑控制器的时序系统比较简单
B.微程序控制器的执行速度比较快
C.CISC处理器常用组合逻辑控制器
D.微程序控制器更有利于指令系统升级
第4题
A.指令执行时,由微命令发生器在相应时间发出所需微命令,控制有关操作
B.指令执行时,由指令自身在相应时间发出所需微命令,控制有关操作
C.组合逻辑控制器不包含译码器单元
D.组合逻辑控制器不需要产生微命令
第5题
A.组合逻辑控制器是依靠硬件电路方式来产生CPU中的各种控制信号。
B.微程序控制器是把预存储在控制存储器中的微指令代码翻译成CPU中的各种控制信号。
C.组合逻辑控制器比微程序控制器的内部设计更加规整,也更容易扩展对新指令的支持。
D.从产生控制信号的速度方面比较,组合逻辑控制器要快于微程序控制器。
第9题
A.组合逻辑控制器的时序系统比较简单
B.微程序控制器的时序系统比较简单
C.两者的时序系统复杂程度相同
D.可能是组合逻辑控制器的时序简单,也可能是微程序控制器的时序简单
第10题
下列有关控制器的说法正确的是()。
A.无论是组合逻辑控制器和时序逻辑控制器,都需要有程序计数器
B.微程序控制器不需要程序计数器,只要有微程序计数器
C.都可以不需要程序计数器
D.以上都不对




为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 上学吧
微信搜一搜
上学吧
上学吧
微信搜一搜
上学吧















