题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
consider the following particle filter implementations.
Consider the following particle filter implementations.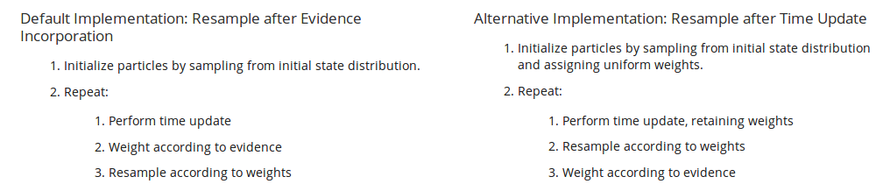 For each of the following statements about the two implementations, select whether they are true or false. The default implementation will typically provide a better estimate of the distribution than the alternate implementation.
For each of the following statements about the two implementations, select whether they are true or false. The default implementation will typically provide a better estimate of the distribution than the alternate implementation.
 如搜索结果不匹配,请 联系老师 获取答案
如搜索结果不匹配,请 联系老师 获取答案