 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
图2所示为机构并接式凸轮连杆组合机构,其中,基础机构是五杆差动连杆机构1-2-3-4-5,附加机构为凸轮机构1’-4-5,构件4为两个机构的公共构件。机构的原动件为凸轮1’,而曲柄1与凸轮1’固接,当原动凸轮转动时,将同时给五杆机构输入一个转动(构件1)和一个移动(构件4),故此双自由度的五杆机构具有确定的运动,这时构件3上任一点(如c点)便能实现复杂的轨迹cx
2. 图2所示为机构并接式凸轮连杆组合机构,其中,基础机构是五杆差动连杆机构1-2-3-4-5,附加机构为凸轮机构1’-4-5,构件4为两个机构的公共构件。机构的原动件为凸轮1’,而曲柄1与凸轮1’固接,当原动凸轮转动时,将同时给五杆机构输入一个转动(构件1)和一个移动(构件4),故此双自由度的五杆机构具有确定的运动,这时构件3上任一点(如C点)便能实现复杂的轨迹Cx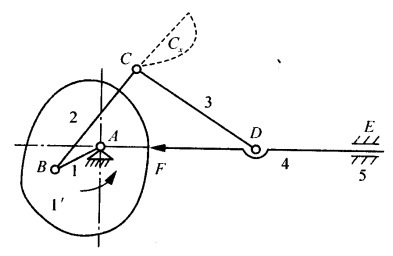
 如搜索结果不匹配,请 联系老师 获取答案
如搜索结果不匹配,请 联系老师 获取答案


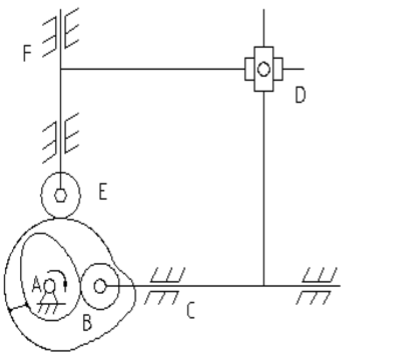
 在如图所示的连杆-凸轮组合机构设计过程中,最后设计的是:
在如图所示的连杆-凸轮组合机构设计过程中,最后设计的是:

























