【填空题】1、简易秒表的设计,根据电路补充程序 要求: 设...
【填空题】1、简易秒表的设计,根据电路补充程序 要求: 设计一个简易秒表,系统一上电,数码管显示“00”每间隔1S,显示加1,当加到60时,数码管显示0,从0开始加。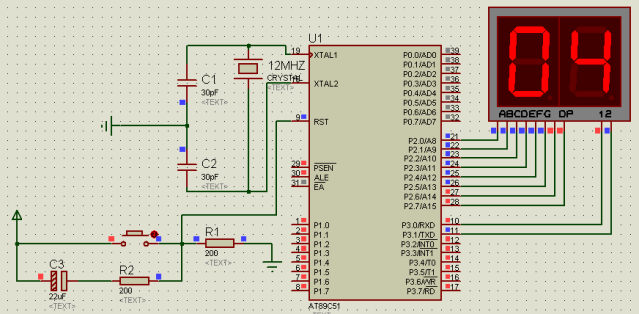 <reg51.h> //包含头文件reg51.h com1=P3^0; com2=P3^1; unsigned char dm ={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};//0-9对应段码 unsigned char c1,miao=0; //定义无符号字符型变量c1为5万us计数器,变量miao为秒计数器。 void ys(unsigned int t)//延时函数 { while( ) } void t0csh()//T0初始化程序的编写 { TH0=(65536- ) 256;//设置T0计数初值高8位,定时时间50ms TL0=(65536- ) 256;//设置T0计数初值低8位,定时时间50ms =0X01; //设置T0为工作方式1,定时器使用 //定时器T0中断允许 //总中断允许 //启动T0 } void xs()//显示函数 { com1= ;com2= ;//选中1号数码管 P2=dm[ ];//显示变量miao的十位 ys(1000); =0xff;//关闭显示,消影 com1=0;com2=1;//选中2号数码管 P2=dm[ ];//显示变量a的个位 ys(1000); //关闭显示,消影 } void main() { //t0初始化 While { xs(); } void tozd( ) //T0中断函数 { TH0=(65536-50000) 256; TL0=(65536-50000) 256; ;//5万us计算器加1 if( )//1S时间到 { c1=0; miao++; if( >59) miao=0;//当秒计数到60,回到0 } }
<reg51.h> //包含头文件reg51.h com1=P3^0; com2=P3^1; unsigned char dm ={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};//0-9对应段码 unsigned char c1,miao=0; //定义无符号字符型变量c1为5万us计数器,变量miao为秒计数器。 void ys(unsigned int t)//延时函数 { while( ) } void t0csh()//T0初始化程序的编写 { TH0=(65536- ) 256;//设置T0计数初值高8位,定时时间50ms TL0=(65536- ) 256;//设置T0计数初值低8位,定时时间50ms =0X01; //设置T0为工作方式1,定时器使用 //定时器T0中断允许 //总中断允许 //启动T0 } void xs()//显示函数 { com1= ;com2= ;//选中1号数码管 P2=dm[ ];//显示变量miao的十位 ys(1000); =0xff;//关闭显示,消影 com1=0;com2=1;//选中2号数码管 P2=dm[ ];//显示变量a的个位 ys(1000); //关闭显示,消影 } void main() { //t0初始化 While { xs(); } void tozd( ) //T0中断函数 { TH0=(65536-50000) 256; TL0=(65536-50000) 256; ;//5万us计算器加1 if( )//1S时间到 { c1=0; miao++; if( >59) miao=0;//当秒计数到60,回到0 } }
 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
 如搜索结果不匹配,请 联系老师 获取答案
如搜索结果不匹配,请 联系老师 获取答案


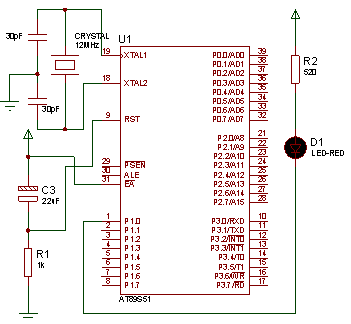 //程序: //功能:LED闪烁控制 /*-------------------第一部分:预处理命令---------------*/ //包含头文件reg51.h,该文件定义了//51单片机的所有特殊功能寄存器 /*--------------第二部分:定义全局变量或常量----------*/ LED=P1^0; //定义P1.0引脚位名称为LED,注意,P1^0必须要大写 /*--------------第三部分:函数原型申明及函数定义----------*/ //函数功能:实现软件延时 //void:说明函数的类型是空类型(表示没有返回值) //delay:函数名,函数名后面有一对小括号 //unsigned int i:形式参数是无符号整型变量i,控制空循环的循环次数 delay(unsigned int i) { while( ) ; //i次空操作 } void //主函数 while(1) //无限循环 //点亮LED delay(20000); //软件延时 LED=1; //点亮LED
//程序: //功能:LED闪烁控制 /*-------------------第一部分:预处理命令---------------*/ //包含头文件reg51.h,该文件定义了//51单片机的所有特殊功能寄存器 /*--------------第二部分:定义全局变量或常量----------*/ LED=P1^0; //定义P1.0引脚位名称为LED,注意,P1^0必须要大写 /*--------------第三部分:函数原型申明及函数定义----------*/ //函数功能:实现软件延时 //void:说明函数的类型是空类型(表示没有返回值) //delay:函数名,函数名后面有一对小括号 //unsigned int i:形式参数是无符号整型变量i,控制空循环的循环次数 delay(unsigned int i) { while( ) ; //i次空操作 } void //主函数 while(1) //无限循环 //点亮LED delay(20000); //软件延时 LED=1; //点亮LED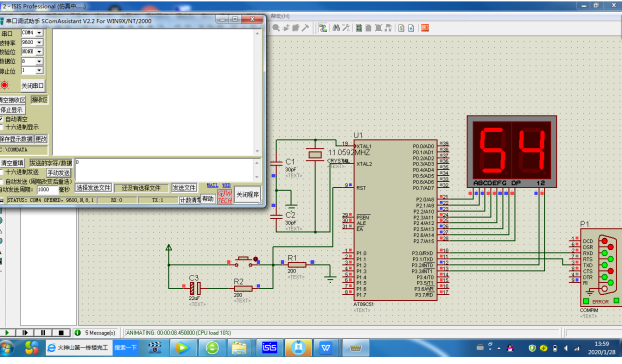 /*---------------第一部分:预处理命令----------*/ include <reg51.h> //包含头文件reg51.h /*----------第二部分:定义全局变量或常量--------*/ sbit com1=P3^2; sbit com2=P3^3; unsigned dm[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};//共阳数码管对应段码 unsigned char c1,miao=50; /*---------第三部分:函数原型申明及函数定义-----*/ void ys(unsigned int t) { while(t--); } void zdcsh()//中断初始化程序的编写 { TH0=(65536-50000)/256; TL0=(65536-50000)%256; //设置T0为工作方式1,定时器使用;定时器T1工作方式2,定时器使用,此时定时器T1作为串口的波特率发生器来使用。 //定时器T0中断允许 //定时器T0关闭工作 //串口波特率为9600b/s TH1=0xfd; //定义串行口工作于方式1,不接收 =0x00;//波特率不倍增 //接收允许 //启动定时器T1工作,定时器T1作为串口的波特率发生器来使用。 ES=1;EA=1;//串口中断允许,总中断允许 } void ()//显示函数 { //选中1号数码管 P2=dm[ ];//显示变量miao的十位 ys(1000); P2=0xff;//关闭显示,消影 com1=0;com2=1;//选中2号数码管 P2= [miao%10];//显示变量miao的个位 ys(1000); //关闭显示,消影 } void main { zdcsh();//调用中断初始化函数 while(1) { } } void tozd( ) //T0中断函数 { TH0=(65536-50000) ;//重新设置T0计数初值高8位,定时时间50ms TL0=(65536-50000) ;//重新设置T0计数初值低8位,定时时间50ms //5万us计算器加1 if( )//1S时间到 { c1=0; miao++; if( ) //当秒计数到60,回到0 } } } void ckzd() 4//串口中断类型号为4 //软件清除中断标志位 if(SBUF== ) //串口接收到字符‘0’启动秒表工作 if( =='1') //串口接收到字符‘1’秒表暂停工作 if(SBUF '2') { a=0;}//串口接收到字符‘2’秒表暂停工作,并显示清0 }
/*---------------第一部分:预处理命令----------*/ include <reg51.h> //包含头文件reg51.h /*----------第二部分:定义全局变量或常量--------*/ sbit com1=P3^2; sbit com2=P3^3; unsigned dm[]={0xc0,0xf9,0xa4,0xb0,0x99,0x92,0x82,0xf8,0x80,0x90};//共阳数码管对应段码 unsigned char c1,miao=50; /*---------第三部分:函数原型申明及函数定义-----*/ void ys(unsigned int t) { while(t--); } void zdcsh()//中断初始化程序的编写 { TH0=(65536-50000)/256; TL0=(65536-50000)%256; //设置T0为工作方式1,定时器使用;定时器T1工作方式2,定时器使用,此时定时器T1作为串口的波特率发生器来使用。 //定时器T0中断允许 //定时器T0关闭工作 //串口波特率为9600b/s TH1=0xfd; //定义串行口工作于方式1,不接收 =0x00;//波特率不倍增 //接收允许 //启动定时器T1工作,定时器T1作为串口的波特率发生器来使用。 ES=1;EA=1;//串口中断允许,总中断允许 } void ()//显示函数 { //选中1号数码管 P2=dm[ ];//显示变量miao的十位 ys(1000); P2=0xff;//关闭显示,消影 com1=0;com2=1;//选中2号数码管 P2= [miao%10];//显示变量miao的个位 ys(1000); //关闭显示,消影 } void main { zdcsh();//调用中断初始化函数 while(1) { } } void tozd( ) //T0中断函数 { TH0=(65536-50000) ;//重新设置T0计数初值高8位,定时时间50ms TL0=(65536-50000) ;//重新设置T0计数初值低8位,定时时间50ms //5万us计算器加1 if( )//1S时间到 { c1=0; miao++; if( ) //当秒计数到60,回到0 } } } void ckzd() 4//串口中断类型号为4 //软件清除中断标志位 if(SBUF== ) //串口接收到字符‘0’启动秒表工作 if( =='1') //串口接收到字符‘1’秒表暂停工作 if(SBUF '2') { a=0;}//串口接收到字符‘2’秒表暂停工作,并显示清0 } 图为一直流应变电桥,E = 4V,R1=R2=R3=R4=350Ω, 求: ①R1为应变片其余为外接电阻, R1增量为△R1=3.5Ω 时输出U0=?。 ②R1、R2是应变片,感受应变极性大小相同,其余为电阻,电压输出U0=?。 ③R1、R2感受应变极性相反,输出U0=?。 ④R1、R2、R3、R4都是应变片,对臂同性,邻臂异性,电压输出U0=?。
图为一直流应变电桥,E = 4V,R1=R2=R3=R4=350Ω, 求: ①R1为应变片其余为外接电阻, R1增量为△R1=3.5Ω 时输出U0=?。 ②R1、R2是应变片,感受应变极性大小相同,其余为电阻,电压输出U0=?。 ③R1、R2感受应变极性相反,输出U0=?。 ④R1、R2、R3、R4都是应变片,对臂同性,邻臂异性,电压输出U0=?。





















