 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
设控制系统的开环传递函数为G(s) H(s),其中
设控制系统的开环传递函数为G(s) H(s),其中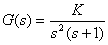 H(s) = 1 无论K为任何正值,下列说法正确的是
H(s) = 1 无论K为任何正值,下列说法正确的是
A.系统根轨迹均在虚轴右侧,所以系统稳定
B.系统根轨迹均在虚轴左侧,所以系统不稳定
C.系统根轨迹均在虚轴右侧,所以系统不稳定
D.系统根轨迹均在虚轴左侧,所以系统稳定
 如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
H(s) = 1 无论K为任何正值,下列说法正确的是
如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
H(s) = 1 无论K为任何正值,下列说法正确的是
A.系统根轨迹均在虚轴右侧,所以系统稳定
B.系统根轨迹均在虚轴左侧,所以系统不稳定
C.系统根轨迹均在虚轴右侧,所以系统不稳定
D.系统根轨迹均在虚轴左侧,所以系统稳定
如搜索结果不匹配,请 联系老师 获取答案
 更多“设控制系统的开环传递函数为G(s) H(s),其中 H(s)…”相关的问题
更多“设控制系统的开环传递函数为G(s) H(s),其中 H(s)…”相关的问题
第1题
 。
。(1)绘制H(s)=(s+4)/s时的闭环根轨迹概略图;
(2)绘制H(s)=(s+1.05)/s时的闭环根轨迹概略图;
(3)比较开环零点变化对根轨迹形状的影响。
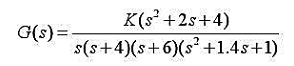
第2题
A.
B.
C.
D.
第3题
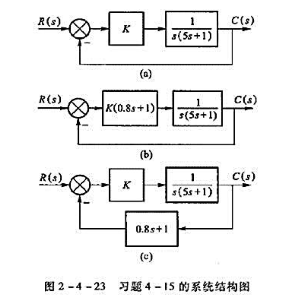
①试分别绘制这三个系统K从0→∞的闭环根轨迹图。
②比较两种校正对系统阶跃响应的影响。
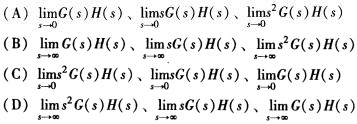
第4题
B.G(s)H(s)的零点
C.1+G(s)H(s)的极点
D.1+G(s)H(s)的零点
第6题
A、(-2,-1)和(0,∞)
B、(-∞,-2]和 [-1,0]
C、(0,1)和(2,∞)
D、(-∞,0)和(1,2)
第7题
B、G(s)H(s)/[1十G(s)H(s)]
C、G(s)/[1十G(s)H(s)]
D、H(s)/[1十G(s)H(s)]
第8题
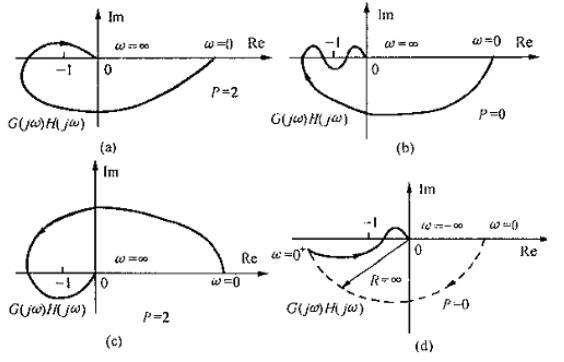
图5-13所示为开环系统的幅相特性。图中p为开环传递函数G(s)H(s)中具有正实部的极点数目,试分析闭环系统的稳定性。




为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 上学吧
微信搜一搜
上学吧
上学吧
微信搜一搜
上学吧















