 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
关于Navigation Stack的结构,以下说法错误的是:
关于Navigation Stack的结构,以下说法错误的是: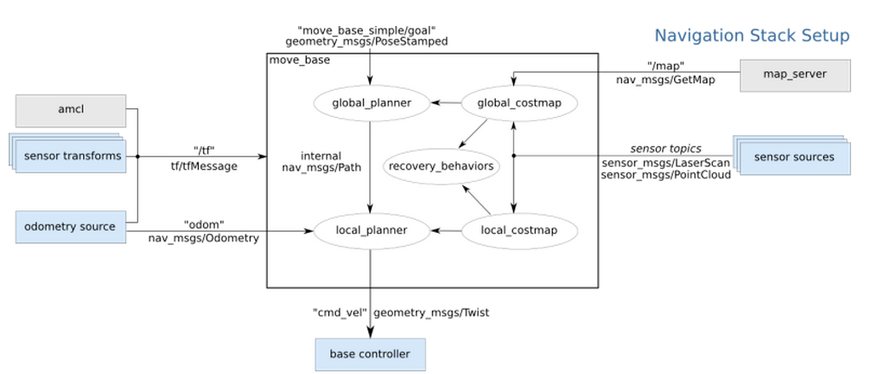
A.move_base是一个抽象概念,其中的global_planner、global_costmap... 才是实际运行的进程
B.导航功能要正常运转,需要的传感器有激光和里程计,作为收入
C.导航功能要正常运转,需要有地图/map消息作为输入
D.导航的目标点,消息类型为geometry_msgs/PoseStamped
 如搜索结果不匹配,请 联系老师 获取答案
如搜索结果不匹配,请 联系老师 获取答案























