 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
3.何谓绝对高程、相对高程及高差?(6分)
 如搜索结果不匹配,请 联系老师 获取答案
如搜索结果不匹配,请 联系老师 获取答案
 更多“3.何谓绝对高程、相对高程及高差?(6分)”相关的问题
更多“3.何谓绝对高程、相对高程及高差?(6分)”相关的问题
第1题
A.A点的绝对高程是170.0m
B.A点绝对高程是-10.0m
C.B点的绝对高程是175.0m
D.B点的绝对高程是-5.0m
E.C点的绝对高程是190.0m
第2题
A.A点的绝对高程是180.0m
B.A点绝对高程是-20.0m
C.B点的绝对高程是185.0m
D.B点的绝对高程是-15.0m
E.C点的绝对高程是200.0m
第3题
一、简答题(本大题共 5 小题,每题 6 分,共 30 分。) 1、按控制方式进行分类,数控系统可分为哪几类,其各自特点是什么? 2、简述数控机床数控装置的组成,并用框图说明一般数控机床的工作原理。 3、试述步进电机的步距角由哪些因素决定,步进电机的转向、转速和总回转角由哪些因素决定。 4、某四相步进电动机,转子上有 100 个齿,按四相四拍和四相八拍运行时,步距角各是多少度?并请写出通电相序。 5、请根据直流伺服电动机机械特性曲线说明升压调速过程。 二、数控编程(本大题共 2小题,共 25 分。) 6、编写下图所示零件数控车削精加工的程序,编程原点坐标(0,0),加工进给速度 F200,主轴转速 S500。图中的Φ65 外圆表面不加工。(绝对坐标或相对坐标编程任意选择一种)(10 分)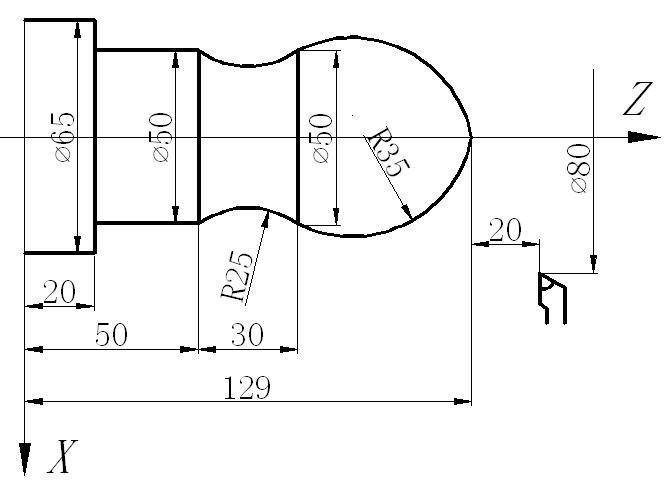 7、用Ф30 的键槽铣刀铣削工件轮廓,已知工件坐标原点 0(90,60),机床原点 M(0,0),刀具起始位置在机床原点处,工件尺寸及加工路线如图所示,对坐标完成数控铣削手工编程,I、J、K为圆弧起点相对其圆心(圆心指向起点的矢量)的 X、Y、Z坐标值。 (注:主轴转速为 300rpm,进给速度为 150mm/min,机床具有刀具半径补偿 G40、G41 和 G42 功能)(15 分)
7、用Ф30 的键槽铣刀铣削工件轮廓,已知工件坐标原点 0(90,60),机床原点 M(0,0),刀具起始位置在机床原点处,工件尺寸及加工路线如图所示,对坐标完成数控铣削手工编程,I、J、K为圆弧起点相对其圆心(圆心指向起点的矢量)的 X、Y、Z坐标值。 (注:主轴转速为 300rpm,进给速度为 150mm/min,机床具有刀具半径补偿 G40、G41 和 G42 功能)(15 分)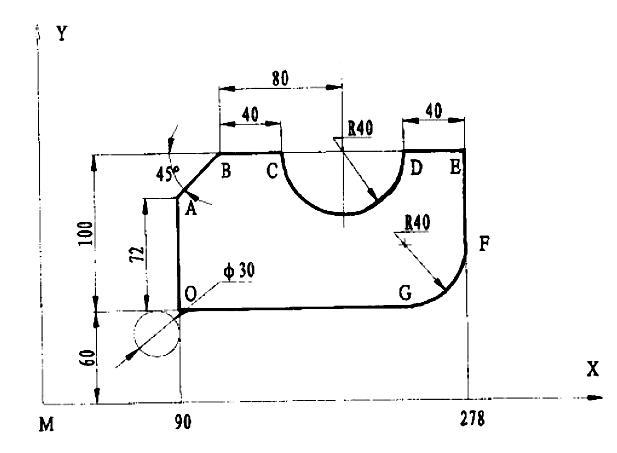 三、分析计算(本大题共 4 小题,共 35 分。) 8、若已知光栅栅距 d=0.01mm,莫尔条纹宽度 W=5mm,则莫尔条纹的放大倍数是多少?栅线角 θ是多少?(5 分) 9、设有一绝对式编码器有 10个码道,求其能分辨的最小角度是多少?若该编码器采用二进制编码,那么,11001101所对应的角度在哪个范围?(6 分) 10、如图所示,被加工圆弧的起点坐标为(4,0),终点坐标为(0,4),请写出逐点比较法插补计算过程,并在图中画出插补轨迹。 (要求给出计算公式)(12 分)
三、分析计算(本大题共 4 小题,共 35 分。) 8、若已知光栅栅距 d=0.01mm,莫尔条纹宽度 W=5mm,则莫尔条纹的放大倍数是多少?栅线角 θ是多少?(5 分) 9、设有一绝对式编码器有 10个码道,求其能分辨的最小角度是多少?若该编码器采用二进制编码,那么,11001101所对应的角度在哪个范围?(6 分) 10、如图所示,被加工圆弧的起点坐标为(4,0),终点坐标为(0,4),请写出逐点比较法插补计算过程,并在图中画出插补轨迹。 (要求给出计算公式)(12 分)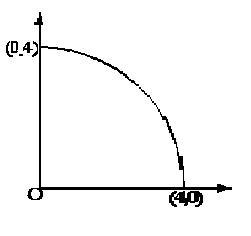 序号 偏差判别 坐标进给 偏差计算 终点判别 0 F0 = 0 X0 =4 Y0 = 0 1 2 3 4 5 6 7 8 9 10 11.请用数字积分插补算法计算下图直线的插补计算过程,并在图中画出插补轨迹。(12 分)
序号 偏差判别 坐标进给 偏差计算 终点判别 0 F0 = 0 X0 =4 Y0 = 0 1 2 3 4 5 6 7 8 9 10 11.请用数字积分插补算法计算下图直线的插补计算过程,并在图中画出插补轨迹。(12 分)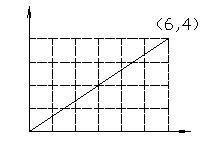 插补脉冲个数 积分值 进给方向 积分修正 终点判别 sumX=sumX+Xe sumY=sumY+Ye sumX=sumX-8 sumY=sumY-8 起点 0 0 1 2 3 4 5 6 7 8 9 10 四、综合题(本大题共 1 小题,共 10 分) 12、图示为步进电机双电压功率放大电路,试说明其工作原理, 并简述图中二极管 D1和 D2的作用。
插补脉冲个数 积分值 进给方向 积分修正 终点判别 sumX=sumX+Xe sumY=sumY+Ye sumX=sumX-8 sumY=sumY-8 起点 0 0 1 2 3 4 5 6 7 8 9 10 四、综合题(本大题共 1 小题,共 10 分) 12、图示为步进电机双电压功率放大电路,试说明其工作原理, 并简述图中二极管 D1和 D2的作用。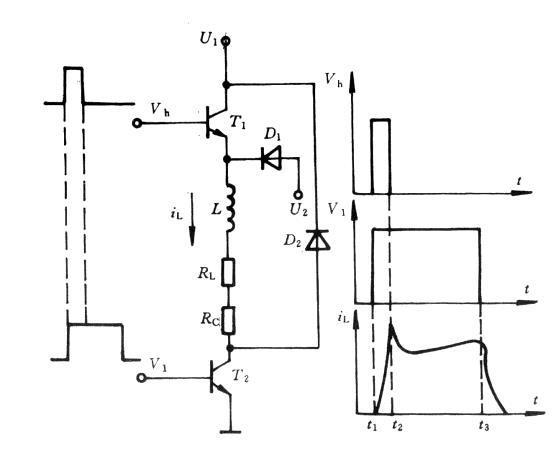
第4题
一、选择题(每小题6分,共72分) 1.仪表的精度等级是指仪表的( ) A.绝对误差 B.最大误差 C.相对误差 D.最大引用误差 2.属于传感器动态特性指标的是( ) A.重复性 B.线性度 C.灵敏度 D.固有频率 3.按照分类,阈值指标属于( ) A.灵敏度 B.静态指标 C.过载能力 D.量程 4.与价格成反比的指标是( ) A.可靠性 B.经济性 C.精度 D.灵敏度 5.属于传感器静态指标的是( ) A.固有频率 B.临界频率 C.阻尼比 D.重复性 6.传感器能感知的输入变化量越小,表示传感器的( ) A.线性度越好 B.迟滞越小 C.重复性越好 D.灵敏度越高 7.传感器的标定是在明确传感器的输入与输出关系的前提下,利用某种( )对传感器进行标定。 A.标准元件 B.正规器件 C.标准器具 D.精度器件 8.传感器的静态指标标定是给传感器输入已知不变的( ),测量其输出。 A.标准电量 B.正规电量 C.标准非电量 D.正规非电量 9.传感器的动态标定是检验传感器的( ) A.静态性能指标 B.频率响应指标 C.动态性能指标 D.相位误差指标 10..基准器中( )精度最高。 A.国家级 B.一等级 C.二等级 D.三等级 11. 在尘埃、油污、温度变化较大伴有振动等干扰的恶劣环境下测量时,传感器的选用必须首先考虑( )因素。 A .响应特性 B.灵敏度 C.稳定性 D.精确度 12. 某温度仪表的测温范围为200~800℃,已知测温误差小于±4℃,则该仪表的精度等级为( )。 A. 0.5级 B. 1.0级 C. 1.5级 D. 2.5级
第6题
第7题
B、氨氯地平
C、可乐定
D、卡托普利
E、缬沙坦
该患者考虑合并心房颤动,心率130次/分,在应用洋地黄治疗过程中,下列哪种情况应立即停止用药A、洋地黄中毒
B、右心衰竭
C、左心衰竭
D、心律失常
E、急性心肌梗死
第8题
某煤矿1974年投人生产,设计年生产能力90万吨,1999年实际产量63.3万吨。矿井为平硐上、下山开拓,抽出式通风。
1999年矿井瓦斯的鉴定结果为高瓦斯矿井,省煤炭工业局审批意见为按煤与瓦斯突出矿井管理。矿井的相对瓦斯涌出量是16.63m3/t.d,绝对瓦斯涌出量是29.93m3/min,自然发火期为7~9个月,煤尘爆炸指数为27%~36%,具有爆炸性,11号煤层的瓦斯含量是15.78m3/t,最大瓦斯压力是16.3kg/cm2。矿井通风状况为:矿井需要风量4510m3/min,实际风量5078m3/min,矿井负压1930Pa,最大风量流程8040m。
井田采用走向平硐开拓。划分为一个水平,即+1800水平,水平内分8个采区,为单水平上、下山开采。现开采的是第四采区下山部分。主要可采煤层为3号、7号和11号。四采区为3条集中下山开拓,其中:轨道下山和通风行人下山进风,轨道下山回风。在采区的西冀共布置2个回采工作面(41112综采工作面、41114高档工作面)、一个综采准备工作面和6个掘进工作面(41116轨巷、41116切眼、41118轨巷、四采区通风行人下山及联络巷)。
事故经过:
事故当班井下共出勤244人,主要是41112综采面和41114高档面的生产、41114综采准备工作面的安装和6个掘进工作面的掘进及维修。
20点41116轨巷开始排放瓦斯,20点38分,井下汇报+1740车场有一股黑烟冲出来,烟雾很大。矿调度室接到报告后,立即通知井下作业人员撤出,通知救护队并组织人员下井探险和抢救幸存者,同时向矿领导、矿务局调度汇报。
21点15分大湾矿救护队到达某煤矿,下井抢险。由于事故波及范围广,破坏严重,为加强抢救工作,抢险指挥部先后调来6个救护中队160名队员,大湾矿、王家寨矿480名职工和某矿578名职工参加抢险,抢救工作紧张而有序。
事故原因:
据现场勘查和分析,这起瓦斯煤尘爆炸事故的直接原因是:41116轨巷掘进工作面因停电造成瓦斯积聚,在排放瓦斯过程中,41114机巷的4台局部通风机同时运行,且 41116轨巷因积水回风不畅,造成41114机巷局部通风机以里部分巷道内风流不稳定,产生循环风,致使在41114机巷中第4联络巷附近巷道内的瓦斯浓度达到爆炸界限。现场人员违章拆卸矿灯引起火花,造成瓦斯爆炸,煤尘参与爆炸。
根据以上内容回答下列问题。
1.《国务院关于特大安全事故行政责任追究的规定》(国务院令第302号)中的特大安全事故包括哪些?
2.根据《安全生产法》的规定,事故调查处理应当遵守的原则是什么?
3.发生瓦斯煤尘爆炸事故时,矿山救护队的主要任务是什么?
第9题
A.p=-29.4 kPa,hv=3 m(水柱)
B.p=29.4 kPa,hv=3 m(水柱)
C.p=-68.6 kPa,hv=7 m(水柱)
D.p=68.6 kPa,hv=6 m(水柱)
第10题
实验目的
通过实验演示使学生了解增量式和绝对式光电编码器的基本原理及在仪器等方面的应用,以便为以后解决工程实际问题打下基础。
实验内容
(1)熟悉增量式光电编码器的基本原理及用法
(2)熟悉绝对式光电编码器的基本原理及用法
实验使用仪器器材
(1)双踪示波器 1台
(2)直流稳压电源 2台
(3)MC型光电脉冲发生器 2台
(其中MCY-1型手摇脉冲发生器与MCZ-2型主轴脉冲发生器各1台)
(4)绝对式光电编码器(QDB9型) 1台
(5)万用表 1台
(6)可逆计数器或数显 1台
实验原理及线路
1.增量式光电编码器
增量式光电编码器,实质是一种光栅变换装置。所谓光栅,实际上就是刻线间距很小的标尺或度盘。它的主要特点是,间距小,线条长,并且线条和缝隙是等宽的。从光栅载体的形状分长光栅和圆光栅。下图所示为两种计量光栅的示意图。其中图(a)为刻划光栅,即在平面度很高的光学玻璃上,用真空镀膜的方法蒸镀很薄的金属膜,并在金属膜上用钻石刀压削或刻制的方法制成大量等间距的线条,线条部分透光而形成光栅。图(b)所示为用蜡腐蚀或照相腐蚀的方法制成的黑白光栅。通常,计量光栅的黑白线条等宽,光栅的节距(光栅常数)为等间隔的。

(1)光栅莫尔条纹
光栅在精密计量和自动控制等方面的应用,大多是利用两块光栅迭合时产生的莫尔条纹效应。所谓莫尔条纹,即当两块相同光栅以微小倾角重迭时,在与栅线大致垂直的方向上所出现的明暗相同的粗条纹,如下图所示。在a-a线上透光面积最大,形成条纹的亮带;在b-b线上光线互相挡住,形成条纹的暗带。假设光栅节距为d,两光栅的栅线交角为θ,条纹间隔(宽度)为m,则它们之间的关系为
(24-1)

一般,θ角很小,故上式可简化为
(24-2)
从条纹图形可以看出,莫尔条纹的位置在两块光栅刻线夹角θ的补角(180°-θ)的平分线上。当两块光栅相对移动时,莫尔条纹就在光栅移动的垂直方向,即臼角的平分线上移动。光栅相对移动一个栅距,则莫尔条纹移动一个间隔(即一个条纹)。所以,只要计测条纹移动的个数n,便可计算出光栅的位移量L,即
L=nq(24-3)
式中,q=d为量化单位,表示每条纹长度量。
下图为长光栅莫尔条纹装置示意图,它将长度量变换为莫尔条纹信号。长光栅副包括指示光栅和标尺光栅,一般指示光栅固定,它同光源、透镜、狭缝、光电器件和前置放大器都装在光电读数头内。标尺光栅的长度由位移长度决定,一般较长,所以它在平滑移动时可以减少晃动。莫尔条纹信号通过狭缝由光电器件接收,其输出光电信号近似正弦波。为判别光栅移动方向,与激光干涉法一样,至少有两路光电接收器,两路光电信号的相位差为π/2,即其中一路为sinθ,另一路为cosθ。

圆光栅变换装置示意图,如下图所示。同样,圆光栅副包括指示光栅和圆光栅盘。圆光栅盘是在一块圆玻璃盘上,等间隔地刻线制成。圆光栅和指示光栅重叠,便产生莫尔条纹。圆光栅盘固定在转轴上,因此这种装置可以将轴旋转的角度量,变换为莫尔条纹信号。光栅盘上每一条刻度线,表示一个角度增量即量化单位。当光栅转盘每旋转一条刻度线时,莫尔条纹将变化一次。这样,通过计算莫尔条纹的变化次数n,便可以计算出转轴旋转的角度θ,即
θ=qn (24-4)
式中,q为量化单位,表示每条纹的角度量。

(2)莫尔条纹法进行位移测量的优点
用莫尔条纹法进行位移一数字量变换有如下优点。
①位移量的放大作用
我们将莫尔条纹间隔与光栅距之比,称为光栅副的放大倍数(率)α,对于微小倾角有
(24-5)
假设θ=8',则α=450,对于每毫米50条线的光栅,莫尔条纹宽度可达9mm。所以说光栅副起到一只高质量“放大器”作用,可将微小变化合理放大,获得信噪比很大的稳定输出。
②误差的平均效应
光电器件接收的光信号,是进入指示光栅视场的刻线数n的综合平均效果。因此,若每一刻线误差为σ0时,则由于平均效应,光电器件输出的总误差为
(24-6)
例如,对于d=0.02mm的光栅副,用长为10mm的硅光电池接收,在视场内同时有500根线工作。若单根线的误差为±1μm,则光电池输出的平均误差仅为±0.04μm。
2.绝对式光电编码器
(1)绝对式光电轴角编码器的结构与原理
下图是光电轴角编码器的结构示意图。来自光源1的光束通过透镜2变成平行光束照射到编码盘3上,通过透光板4上确定位置的若干光孔,输出一条窄细的光束被几个光电元件5接收。根据码盘的不同位置,各光束分别编码转换为电信号后,由解码器6与输出电路7,输出表示角度位置的数字信号。

码盘上根据检测精度需要的位数N,光刻加工出相应的N条码道,用透光和不透光的方法表示各位置处代码的“1”和“0”状态。下图(a)是自然二进制码盘的图案(表中的B表示了它们的编码规律),在图中黑点的位置上装置光电读数头,码盘内侧表示高位。在如图的举例中,码道N=4,最高位数为24=16个角度位置。

自然二进制码虽然简单,但存在着使用上的问题,这就是由于图案转换点处位置不分明而引起的粗大误差。例如,在由7转换到8的位置时,光束要通过码盘0111和1000的交界处(或称渡越区)。因为码盘的工艺和光敏元件安装的误差,有可能使读数头的最内圈(高位)定位位置上的光电元件比其余的超前或落后一点,这将导致可能出现两种极端的读数值,即1111或0000,从而引起读数的粗大误差,这种误差是绝对不能允许的。
(2)格雷码与自然二进制码的转换
为了避免这种误差,采用了格雷码(Groy code)图案的码盘[上图(b)],下表给出了格雷码和自然二进制码的比较。
| 自然二进制码和格雷码的比较 | ||
| D(十进制) | B(二进制) | R(格雷码) |
| 0 | 0000 | 0000 |
| 1 | 0001 | 0001 |
| 2 | 0010 | 0011 |
| 3 | 0011 | 0010 |
| 4 | 0100 | 0110 |
| 5 | 0101 | 0111 |
| 6 | 0110 | 0101 |
| 7 | 0111 | 0100 |
| 8 | 1000 | 1100 |
| 9 | 1001 | 1101 |
| A(10) | 1010 | 1111 |
| B(11) | 1011 | 1110 |
| C(12) | 1100 | 1010 |
| D(13) | 1101 | 1011 |
| E(14) | 1110 | 1001 |
| F(15) | 1111 | 1000 |
由表中可以看出,格雷码具有代码从任何值转换到相邻值时,字节各位数中仅有一位发生状态变化的特点。而自然二进制则不同,代码经常有2~3位甚至4位数值同时变化的情况。这样,采用格雷码的方法即使发生前述的错移,由于它在进位时相邻界面图案的转换仅仅发生一个最小量化单位(最小分辨率)的改变,因而不会产生粗大误差。这种编码方法称作单位距离性码(unit distance code),是实用中常采用的方法。
格雷码转换为自然二进制码,要作相应的变换,设二进制码中的某位的位数为K,(K=1,2,3,4,…,n),该位的自然二进制码的符号为BK(可取0,1值),该位的格雷码符号为GK,则格雷码和自然码
之间的关系为:
BK-1=GK-1··BK(24-7)
上式是“异或”逻辑电路的数学关系,因此可用标准的“异或”电路,将格雷码转换为自然二进制码,如下图(b)所示。图(a)是“异或”电路的真值表,它满足式(24-7)的逻辑关系。如图(b)所示,为了得到某一位的自然二进制码,只要将高一位的已经计算出的(或者在最高位时的“0”状态)自然二进制码的值和本位的格雷码值,输入到“异或”电路中即可。K-1个“异或”电路,可以进行K位的二进制代码的变换。

实验设备及线路
1.增量式光电编码器
增量式光电编码器实际上就是一种光电脉冲发生器。如MC型光电脉冲发生器,它是由圆光栅及光电整形放大电路等组成的。现简介如下:
(1)用途
MC型光电脉冲发生器,分MCY型手摇脉冲发生器和MCZ型主轴脉冲发生器两种。
MCY型脉冲发生器发出矩形脉冲,主要用作数字程序控制机床的给定信号。
MCZ型光电脉冲发生器,用于检测各种设备,仪器的旋转角,轴的角速度和角加速度以及通过机械传动部件转换成直线位移的测量,其输出为脉冲信号。
如配置可逆计数器也可作为数字显示装置的检测元件。
(2)主要技术参数
①MCY 1手摇脉冲发生器
输出信号通道: A,B两路
脉冲数: A—100/转
B—100/转
相位差: 近似1/4周期
波形: 正矩形脉冲
输出高电平: 近似+5V
输出低电平: 近似+0.3V
电源电压: +5V,-3V
灯源电压: +5V
灯泡: 2.1~3W/6V
外形尺寸: 100×200mm
重量: 1.2kg
②MCZ—2主轴脉冲发生器
输出信号通道: A,B两路
输出波形: 正矩形脉冲空载时上升、下降延迟时间≤2μs
输出波形相位差: 1/4周期
输出高电平: ≥11V
输出低电平: ≤2V
主轴最高转速: 1600r/min
最高重复频率: 30kHz
负载能力: ≥10mA
外接电源: +12V,150mA
重量: 0.8kg
外形尺寸: 68×160mm
输出脉冲系列: 64,100,200,250,360,500,600,720,800,900,
1000,1024,1200
(3)结构原理
MC型光电脉冲发生器,是由灯泡发光二极管,聚光透镜,光电盘,光阑板,光敏三极管和光电整形放大电路所组成,如下图所示。

光源所发出的光线经聚光镜聚光后发射出平行光。
光电盘和光栏板是用玻璃材料经研磨,抛光制成,玻璃表面真空镀上一层不锈钢的铬层,透光条纹是用照相腐蚀法制成。
手摇脉冲发生器光电盘透光条纹,圆周等分为100条。
主轴脉冲发生器光电盘透光条纹,圆周等分为脉冲系列数条纹和零脉冲条纹二行。
光栏板的透光条纹宽度应小于光电盘的不透光条纹宽度。
手摇脉冲发生器光栏板透光条纹有A、B两条,如下图所示。

光栏板每一透光条纹后面,安置光敏三极管一个,构成一条信号输出通道。
当主轴带动光电盘一起转动时,光敏管就接收到光线亮暗变化的信号,引起了光敏管所通过的电流大小发生变化,这变化的信号是电流,经光电整形放大电路后输出正向矩形脉冲。
当光栏板透光条纹A与光电盘任一透光条纹重合时,则光栏板透光条纹B与光电盘另一透光条纹的重合性错开1/4周期,因此A、B二通道输出波形相位,也相差1/4周期。
手摇脉冲发生器的手轮刻度与任一通道的脉冲数相对应。
手摇脉冲发生器、主轴脉冲发生器的电子线路部分分别如下面两个图所示。


手摇脉冲发生器的接线编号:2——+5V;4——3V;10——0电平;13——输出A;16——输出B;18——输出C。
主轴脉冲发生器的插脚编号:1——+12V;2——C(具有零脉冲输出);3——方波A;4——0电平;5——方波B;6——脉冲A'(具有辨向脉冲输出);7——脉冲B'。
(4)仪器的安装、使用注意事项
①脉冲发生器灯泡电源,直接焊接在灯座上,为了延长灯泡的使用寿命故采用降压使用,灯座电压在灯头位置应保持5V。
②各通道的输出脉冲宽度,可用相对应的电位器条件。
③产品0V电源与外壳浮置是否需要当地连接,由用户自己决定。
④为了防止光电盘与光阑板之间摩擦损坏,安装时轴系必须严格同心,不应存在松紧现象。
⑤两种光电脉冲发生器的安装尺寸如下面两个图所示。


2.绝对式光电编码器
(1)用途
QDB9型光电编码器是一种高精度的将轴转角变为编码电信号的仪器。即依靠光电转换方法将属输入的机械量——轴转角转换成相应的数字量。它适用于数字控制机的模拟——数字转换装置和随动系统中。它具有精度高、结构简单紧凑,可靠性好等特点,因而广泛用于自动控制仪器及系统中。如它是近代国防雷达跟踪观测装备及炮瞄指挥仪等的重要部件。
(2)仪器的结构及工作原理
①结构:本仪器可分为如下几部分:
A.光源:直流供电,电流300mA,限流电阻5.1Ω,发光管采用的是2GI红外发光二极管。
B.编码盘:编码盘上有九个数字码盘和一个通圈,是用照相镀铬法制成的。在同一位码道上印制成黑白等间隔的图案,以形成二进制循环码。
C.读出系统:光电转换原件是10支3DU2C型光电三极管。每只管子对准一条码道。
D.轴系:是主触和高精度的滚动轴承等组成,具有较高的置中精度,启动力矩小等特点。
E.电路系统:采用双面印刷电路板,PMOS集成电路。它具有放大整形,译码的功能,最后输出电平信号形成自然二进制码,(电路原理如下图所示)。

②仪器的工作原理:(如下图所示)

A.光电转换原理:
由发光二极管(2GL)所发出的红外光,经过编码盘和狭缝,照射到光敏元件(3DU2C)上,由于编码图案每位都是一些等间隔的透光部分和不透光部分所组成。所以当码盘转到某一位置时,有的光敏元件接收了光照射,有的不受光照射。受光照射者为“有”记为“1”,不受光照射者为“无”记为“0”。这样,对于轴的任意位置,通过输出的信号就会得到由“1”和“0”组成的九位数字(通圈除外)例如:010011001;101101001;001101010;等这样的九位数字。在0~360°范围内共有512个(二进制循环码)。
B.电路工作原理:
光电三极管输出的信号,经过放大整形电路,使波形变成大小幅度比较一致的矩形波。再经过译码电路进行逻辑运算,最后输出电平信号(自然二进制码)。
(3)主要技术参数及规格
①测量范围: 0~360°
②码制: 0~360°范围内,输出512个自然二进制码
③最大综合码误差: 20'
④角分辨率: 42'11"
⑤自然二进制码信号输出:在光源电压1.5mV、300mA,偏压±12V,常温条件下
高电平:≥+10V
低电平:≤0V
输出波形:矩形波
⑥启动力矩: ≤20g·cm
⑦最大转速: 200r/min
⑧红外发光二极管的寿命:≥5000h
⑨仪器外形尺寸: 110mm×75mm
轴头尺寸: 5mm×15mm
⑩重量: 约1kg
(4)仪器的安装使用及注意事项
①仪器的安装:(参考下图)

A.仪器在安装时,须靠外圆定位面定位,再在
97±0.15圆周上四等分
5.2的孔,用M5螺钉刚性的固定在机体上,轴向和径向不得串动。
B.主轴与被测轴连接时要求同心,平行,偏心不大于0.05mm,不平行度不大于0.05mm。
②接线顺序:
本仪器采用CD1—15—J型插头座,接线顺序为光源(+)、光源(-)、偏压(+12V)、偏压(-12V),各点位(从里圈到最外圈,包括通圈)接地共15条线,详见下表所示的接线表。
| QDB9型光电编码器接线顺序表 | |
| 脚 号 | 接 线 |
| 1 | 光源(+) |
| 2 | 光源(-) |
| 3 | 偏压(+12V) |
| 4 | 偏压(-12V) |
| 5 | 第一位 |
| 6 | 第二位 |
| 7 | 第三位 |
| 8 | 第四位 |
| 9 | 第五位 |
| 10 | 第六位 |
| 11 | 第七位 |
| 12 | 第八位 |
| 13 | 第九位 |
| 14 | 通圈 |
| 15 | 接地 |
③电路注意事项
由于发光二极管正向伏安特性很陡,如果电压稍有变化,就能引起电流很大变化,所以,在调整发光二极管工作点时,必须注意电流的变化,使他不得超过规定值。
④为确保仪器的正常运行,正式使用前应该对编码器程序进行检测。




为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 上学吧
微信搜一搜
上学吧
上学吧
微信搜一搜
上学吧















