 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
当运动模型
当运动模型 简化为
简化为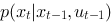 时,以下哪些情况所导致的估计错误是由简化所引起的
时,以下哪些情况所导致的估计错误是由简化所引起的
A.环境发生动态变化
B.机器人存在执行误差
C.所估计机器人位姿上存在障碍物
D.所估计机器人路径上存在障碍物
 如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
简化为时,以下哪些情况所导致的估计错误是由简化所引起的
如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
简化为时,以下哪些情况所导致的估计错误是由简化所引起的
A.环境发生动态变化
B.机器人存在执行误差
C.所估计机器人位姿上存在障碍物
D.所估计机器人路径上存在障碍物
如搜索结果不匹配,请 联系老师 获取答案
 更多“当运动模型[图]简化为[图]时,以下哪些情况所导致的估...”相关的问题
更多“当运动模型[图]简化为[图]时,以下哪些情况所导致的估...”相关的问题
第5题
A.Java
B.C++
C.VisualBasic.NET
D.C#2.0
E.XML-DTD(Deprecated)
第6题
下图是一个存储器的简单模型。当 =10时,
=10时, 的内容是_____。
的内容是_____。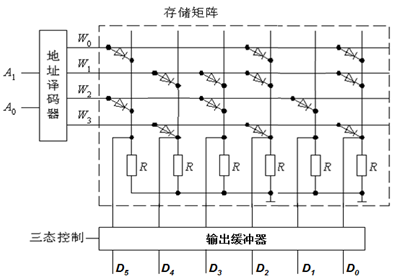
A、101010
B、100101
C、011101
D、010101
E、都不对
第9题
转速表的简化模型如图所示。杆CD的两端各有质量为m的C球和D球,杆CD与转轴AB铰接于各自的中点,质量不计。当转轴AB转动时,杆CD的转角φ就发生变化。设ω=0时,φ=φ0,且盘簧中无力。盘簧产生的力矩M与转角φ的关系为M=k(φ-φ0),式中k为盘簧刚度系数。轴承A,B间距离为2b。求(1)角速度ω与角φ的关系;(2)当系统处于图示平面时,轴承A,B的约束力。AO=OB=6。




为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 上学吧
微信搜一搜
上学吧
上学吧
微信搜一搜
上学吧


 图中
图中 ,
, 为状态变量,则其对应的状态空间表达式
为状态变量,则其对应的状态空间表达式 的系数矩阵分别为
的系数矩阵分别为




 ,
, 为状态变量,则其对应的状态空间表达式
为状态变量,则其对应的状态空间表达式 的系数矩阵分别为
的系数矩阵分别为




 ,与
,与 相比,当
相比,当 时, 估计量
时, 估计量 的方差
的方差 将是原来的( )
将是原来的( ) ,
, ,求
,求 。
。
 ,该模型系统( )。
,该模型系统( )。













