 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[单选题]
关于下述线性定常系统稳定性的说法正确的是()
关于下述线性定常系统稳定性的说法正确的是()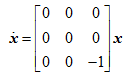
A.系统有唯一的平衡状态。
B.系统有无穷多个平衡状态。
C.该系统是渐近稳定的。
D.该系统的每一个平衡状态都是李雅普诺夫意义下稳定的。
 如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
A.系统有唯一的平衡状态。
B.系统有无穷多个平衡状态。
C.该系统是渐近稳定的。
D.该系统的每一个平衡状态都是李雅普诺夫意义下稳定的。
如搜索结果不匹配,请 联系老师 获取答案
 更多“关于下述线性定常系统稳定性的说法正确的是() [图]A、..…”相关的问题
更多“关于下述线性定常系统稳定性的说法正确的是() [图]A、..…”相关的问题
第1题
A.确定系统的事务分类
B.属于一种线性结构,没有任何的判断分支
C.同一数据来源进入系统的数据流所经过的数据处理过程都相同
D.处于数据流程图高层的数据处理往往是彼此独立的,需要变换处理
第2题
非线性系统的结构图如下图所示,其中 ,则下列说法正确的是()
,则下列说法正确的是()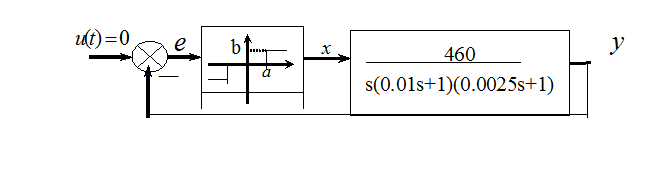
A、系统的描述函数为
B、系统不存在自振荡
C、系统存在自振荡,且自振荡的振幅为A=1.83,频率为w=200
D、系统存在自振荡,且自振荡的振幅为A=0.76,频率为w=200
第3题
非线性系统的结构图如下图所示,其中 ,
, ,
, 则下列说法正确的是()
则下列说法正确的是()
A、系统的描述函数为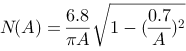
B、系统不存在自振荡
C、系统存在自振荡,且自振荡的振幅为A=1.83,频率为w=200
D、系统存在自振荡,且自振荡的振幅为A=0.76,频率为w=200
第4题
连续时间奇信号 通过一连续时间线性时不变系统
通过一连续时间线性时不变系统 得到输出
得到输出 ,若
,若 是奇信号,那么下述说法正确的是:
是奇信号,那么下述说法正确的是:
A、 一定是偶信号
一定是偶信号
B、 一定是奇信号
一定是奇信号
C、 既不是奇信号也不是偶信号
既不是奇信号也不是偶信号
D、 既有可能是奇信号也有可能是偶信号
既有可能是奇信号也有可能是偶信号
第5题
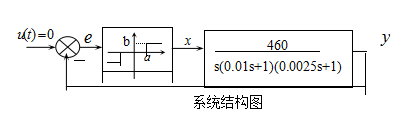
非线性系统的结构图如下图所示,其中,,则下列说法正确的是()
A、系统的描述函数为
B、系统不存在自振荡
C、系统存在自振荡,且自振荡的振幅为A=1.83,频率为w=200
D、系统存在自振荡,且自振荡的振幅为A=0.76,频率为w=200
第6题
非线性系统的 及
及 的轨迹如下图所示,(该非线性系统相对负倒数描述函数曲线重合于实轴,为了清晰起见,画成了双线)。其中交点
的轨迹如下图所示,(该非线性系统相对负倒数描述函数曲线重合于实轴,为了清晰起见,画成了双线)。其中交点 处的振幅为
处的振幅为 ,交点
,交点 处的振幅为
处的振幅为 ,频率为
,频率为 。则下列说法正确的是
。则下列说法正确的是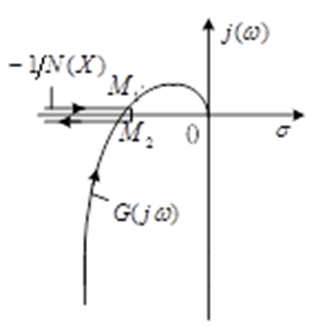
A、点产生的自持振荡是稳定的
B、点产生的自持振荡是稳定的
C、系统的自振幅值为
D、系统的自振频率为
第7题
非线性系统的及的轨迹如下图所示,(该非线性系统相对负倒数描述函数曲线重合于实轴,为了清晰起见,画成了双线)。其中交点处的振幅为,交点处的振幅为,频率为。则下列说法正确的是( )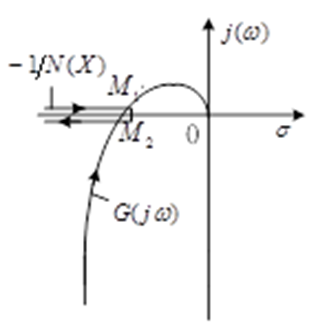
A、点产生的自持振荡是稳定的
B、点产生的自持振荡是稳定的
C、系统的自振幅值为
D、系统的自振频率为
第8题
如下图所示非线性系统,其中死区继电特性的参数 ,
, 。则下列说法正确的是
。则下列说法正确的是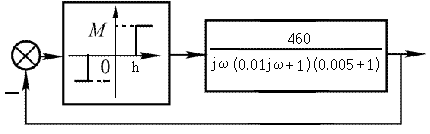
A、系统存在着两个频率相同,但振幅不同的周期运动
B、相对负倒描述函数为

C、振幅为0.75的周期运动是稳定的
D、振幅为1.84的周期运动是稳定的
第9题
如下图所示非线性系统,其中死区继电特性的参数,。则下列说法正确的是
A、系统存在着两个频率相同,但振幅不同的周期运动
B、相对负倒描述函数为
C、振幅为0.75的周期运动是稳定的
D、振幅为1.84的周期运动是稳定的
第10题
如下图所示非线性系统,其中死区继电特性的参数 。则下列说法正确的是( )
。则下列说法正确的是( )
A、系统存在着两个频率相同,但振幅不同的周期运动
B、相对负倒描述函数为
C、振幅为0.75的周期运动是稳定的
D、振幅为1.84的周期运动是稳定的




为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 上学吧
微信搜一搜
上学吧
上学吧
微信搜一搜
上学吧















