 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
矢量控制的关键是静止坐标系和旋转坐标系之间的坐标变换,实现该变换的关键是找到两坐标系之间的()。
 如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如搜索结果不匹配,请 联系老师 获取答案
如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如搜索结果不匹配,请 联系老师 获取答案
 更多“矢量控制的关键是静止坐标系和旋转坐标系之间的坐标变换,实现该…”相关的问题
更多“矢量控制的关键是静止坐标系和旋转坐标系之间的坐标变换,实现该…”相关的问题
第2题
A、它的行列式等于1
B、它的行列式可以是+1和-1
C、它是正交矩阵
D、它的逆矩阵等于它自身的转置
第3题
A、惯性坐标系和旋转坐标系中,矢量的时间导数是不同的
B、与惯性坐标系中的运动方程相比,旋转坐标系运动方程仅多了一项惯性离心力
C、大气运动方程中必须考虑地球旋转的作用,这种旋转作用就通过折向力反映出来
D、惯性坐标系和旋转坐标系中,连续方程的形式是相同的
第4题
若某矢量在坐标系A和坐标系B中的投影之间存在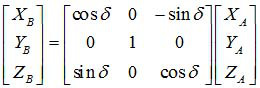 , 则坐标系A与B之间的关系是()。
, 则坐标系A与B之间的关系是()。
A、两个坐标系的 轴重合
轴重合
B、两个坐标系的 轴重合
轴重合
C、两个坐标系的 轴重合
轴重合
D、三个坐标轴都不重合
第6题
A、地面坐标系向弹体坐标系的变换,以及速度坐标系向弹体坐标系的变换都是顺变换。
B、地面坐标系向弹体坐标系的变换,以及速度坐标系向弹体坐标系的变换都是逆变换。
C、地面坐标系向弹体坐标系的变换是逆变换,而速度坐标系向弹体坐标系的变换是顺变换。
D、地面坐标系向弹体坐标系的变换是顺变换,而速度坐标系向弹体坐标系的变换是逆变换。




为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 上学吧
微信搜一搜
上学吧
上学吧
微信搜一搜
上学吧















