 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
如图所示的机器人有两个自由度,变换矩阵0TH是用符号形式给出的,这和对于特定位置给出的数字形式等同。连杆l1和l2的长度均为1英尺。 (a)推导关于θ1和θ2的符号形式的逆运动方程。 (b)计算对于给定位置的θ1和θ2的值。
如图所示的机器人有两个自由度,变换矩阵0TH是用符号形式给出的,这和对于特定位置给出的数字形式等同。连杆l1和l2的长度均为1英尺。 (a)推导关于θ1和θ2的符号形式的逆运动方程。 (b)计算对于给定位置的θ1和θ2的值。 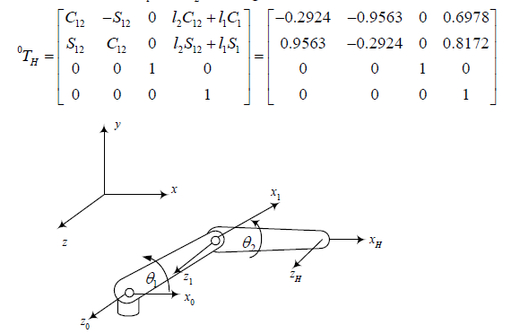
如图所示的机器人有两个自由度,变换矩阵0TH是用符号形式给出的,这和对于特定位置给出的数字形式等同。连杆l1和l2的长度均为1英尺。 (a)推导关于θ1和θ2的符号形式的逆运动方程。 (b)计算对于给定位置的θ1和θ2的值。
 如搜索结果不匹配,请 联系老师 获取答案
如搜索结果不匹配,请 联系老师 获取答案


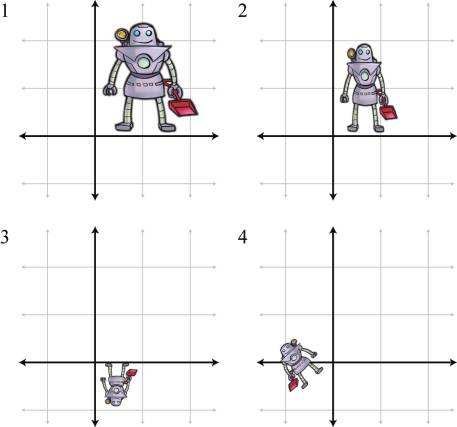 图中机器人的变换和下列矩阵: (a)
图中机器人的变换和下列矩阵: (a) , (b)
, (b) , (c)
, (c) , (d)
, (d) . 正确的对应顺序是:
. 正确的对应顺序是: 值,使系统阶跃响应的峰值时间
值,使系统阶跃响应的峰值时间 (s),超调量
(s),超调量 %=0.2%。
%=0.2%。




















