 题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
已知单位负反馈系统的开环传递函数为试用根轨迹法确定使闭环主导极点的阻尼比ξ=0.5和自然振荡
已知单位负反馈系统的开环传递函数为

试用根轨迹法确定使闭环主导极点的阻尼比ξ=0.5和自然振荡角频率ωn=2时的Kg值。
 如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
已知单位负反馈系统的开环传递函数为
试用根轨迹法确定使闭环主导极点的阻尼比ξ=0.5和自然振荡角频率ωn=2时的Kg值。
如搜索结果不匹配,请 联系老师 获取答案
 更多“已知单位负反馈系统的开环传递函数为试用根轨迹法确定使闭环主导…”相关的问题
更多“已知单位负反馈系统的开环传递函数为试用根轨迹法确定使闭环主导…”相关的问题
第3题
 根轨迹图如题图所示。
根轨迹图如题图所示。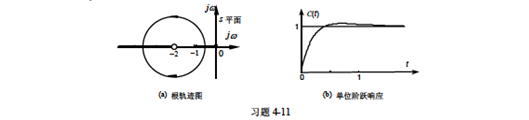
(1)当系统的阻尼振荡频率 时,试确定闭环主导极点的值与相应的增益值。
时,试确定闭环主导极点的值与相应的增益值。
(2)当系统的阻尼参数ζ=1时,其单位阶跃响应如题图所示,试分析超调量产生的原因。
第5题
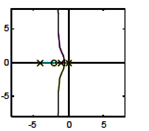
(1)以K为参变量,大致画出系统的根轨迹。
(2)当一个闭环极点为-8时,K=?并对相应的K求出另外两个闭环极点。
(3)按照主导极点的概念,在上述闭环极点的情况下,该系统能否用一个二阶系统去近似?若可以,求该系统的调节时间。
第6题
 (1)确定系统的开环传递函数。 (2)试设计一串联控制器K(s),并确定其参数值。要求满足以下条件:①闭环系统稳定;②闭环极点个数不变;③根轨迹主要分支过闭环极点-2±j4。 (3)画出校正后系统的根轨迹图。闭环极点-2±j4是否为系统的主导极点?概述理由。
(1)确定系统的开环传递函数。 (2)试设计一串联控制器K(s),并确定其参数值。要求满足以下条件:①闭环系统稳定;②闭环极点个数不变;③根轨迹主要分支过闭环极点-2±j4。 (3)画出校正后系统的根轨迹图。闭环极点-2±j4是否为系统的主导极点?概述理由。
第7题
 。 (1)确定控制器参数k、p、z的值。要求满足以下条件: 1)闭环系统稳定。 2)使系统主导极点具有:ζ=0.5、ωn=4rad/s。 3)使系统的稳态速度误差系数Kv=1.5s-1。 (2)画出校正后系统的概略根轨迹图(参数k从0→∞,不要求算出特征点的准确值)。 (3)采用主导极点法简化校正后的高阶系统,并求出它的闭环传递函数。
。 (1)确定控制器参数k、p、z的值。要求满足以下条件: 1)闭环系统稳定。 2)使系统主导极点具有:ζ=0.5、ωn=4rad/s。 3)使系统的稳态速度误差系数Kv=1.5s-1。 (2)画出校正后系统的概略根轨迹图(参数k从0→∞,不要求算出特征点的准确值)。 (3)采用主导极点法简化校正后的高阶系统,并求出它的闭环传递函数。




为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 上学吧
微信搜一搜
上学吧
上学吧
微信搜一搜
上学吧


 ,试用劳斯判据判别闭环系统的稳定性。
,试用劳斯判据判别闭环系统的稳定性。 试绘制闭环系统的根轨迹图。
试绘制闭环系统的根轨迹图。













