题目内容
(请给出正确答案)
题目内容
(请给出正确答案)
[主观题]
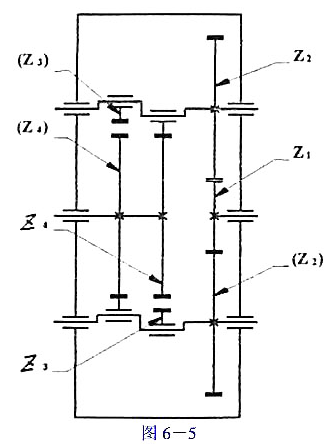
如图6-5所示为一种用于机器人手臂的减速器,Z1为输入,转速为N1,双联齿轮Z4为输出.
已知各齿轮齿数为:Z1=20,Z2=40,Z3=72,Z4=70,求:
(1)分析内齿轮Z3的运动,确定其自转角速度N3.
(2)计算内齿轮Z3的公转角速度Nh.
(3)计算减速器的转速比i14.
 如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
如搜索结果不匹配,请 联系老师 获取答案
题目内容
(请给出正确答案)
(1)分析内齿轮Z3的运动,确定其自转角速度N3.
(2)计算内齿轮Z3的公转角速度Nh.
(3)计算减速器的转速比i14.
如搜索结果不匹配,请 联系老师 获取答案
 更多“如图6-5所示为一种用于机器人手臂的减速器,Z1为输入,转速…”相关的问题
更多“如图6-5所示为一种用于机器人手臂的减速器,Z1为输入,转速…”相关的问题
第1题

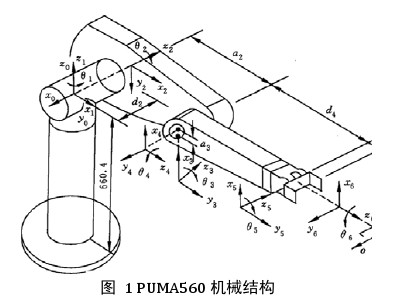
(1),小臂伸长规律为s(t)=0.2t2m,OA=0.8m,s1和ψ不变;
(2),手臂绕铅垂轴z转动的规律是
s1和s不变;
(3),机器人向右移动的规律是s1(t)=0.1t2m,OA=0.8m,AB=0.2m,s和ψ不变。




为了保护您的账号安全,请在“上学吧”公众号进行验证,点击“官网服务”-“账号验证”后输入验证码“”完成验证,验证成功后方可继续查看答案!

 微信搜一搜
微信搜一搜
 上学吧
微信搜一搜
上学吧
上学吧
微信搜一搜
上学吧

 试编制一张频数分布表。
试编制一张频数分布表。